-19%

MPU6050 六軸串口加速度計模組 / 陀螺儀模組 / 內建卡曼濾波算法
原始價格:NT$480。NT$390目前價格:NT$390。 (未稅)
- 描述
- 評價 (0)
描述
描述
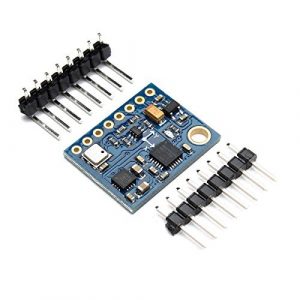
MPU6050 六軸串口加速度計模組 / 陀螺儀模組 / 內建卡曼濾波算法
MPU6050 六軸串口加速度計模組採用高精度的陀螺加速度計MPU6050,通過處理器讀取MPU6050的測量資料然後通過串口輸出,免去了用戶自己去開發MPU6050複雜的I2C協議,同時精心的PCB佈局和工藝保證了MPU6050收到外接的干擾最小,測量的精度最高。卡爾曼濾波己於模組内微控制器計算好,直接由UART串列口輸出。
- 模組內部自帶電壓穩定電路,可以相容3.3V/5V的嵌入式系統,連接方便。
- 模組保留了MPU6050的I2C介面,以滿足高級使用者希望訪問底層測量資料的需求。
- 採用先進的數位濾波技術,能有效降低測量雜訊,提高測量精度。
- 模組內部集成了姿態解算器,配合動態卡爾曼濾波演算法,能夠在動態環境下準確輸出模組的當前姿態,姿態測量精度0.01度,穩定性極高,性能甚至優於某些專業的傾角儀!
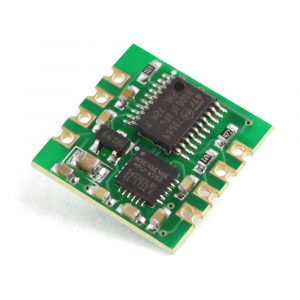
- 採用郵票孔鍍金工藝,品質保證,可嵌入用戶的PCB板中。
MPU6050 六軸串口加速度計模組 發送的資料包括加速度,角速度,角度。其中,加速度和角速度是原始資料輸出,角度資料是經過我們的演算法解算處理的。資料輸出的速率是100Hz和20Hz可選的。115200的串列傳輸速率下,是100Hz的資料輸出速率。9600串列傳輸速率為20Hz的資料輸出速率。默認是115200串列傳輸速率,100Hz的資料輸出速率,模組輸出的速率是20Hz和100Hz可選的。100Hz就是每隔10ms輸出一組完整的資料,包括33個位元組,加速度、角速度、角度全部輸出。
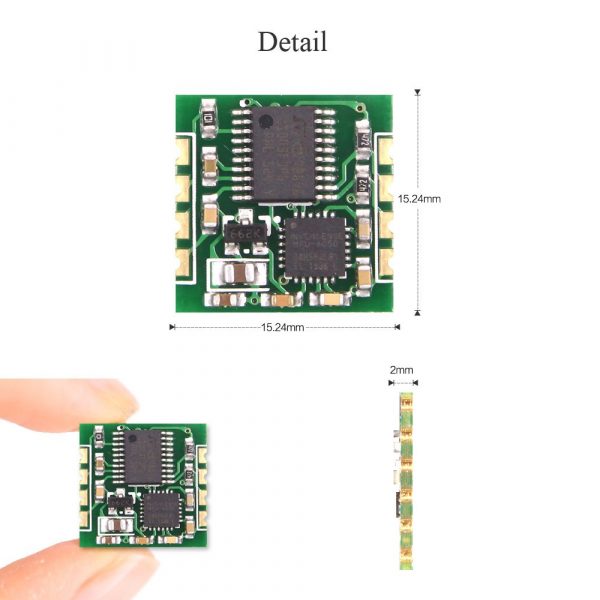
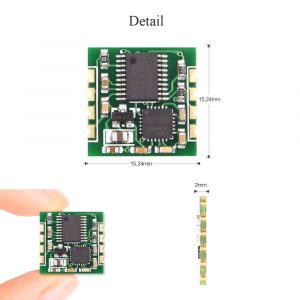
體積不足一枚1毛硬幣大小,模組厚度2mm,郵票孔設計可以方面地將模組嵌入到使用者的電路板中。
MPU6050 六軸串口加速度計模組參數
- 電壓:3V~6V
- 電流:<10mA
- 體積:15.24mm X 15.24mm X 2mm
- 焊盤間距:上下100mil(2.54mm),左右600mil(15.24mm)
- 測量維度:加速度:3維,角速度:3維,姿態角:3維
- 量程:加速度:±2g,角速度:±250°/s。
- 解析度:加速度:6.1e-5g,角速度:7.6e-3°/s。
- 穩定性:加速度:0.001g,角速度0.02°/s。
- 姿態測量穩定度:0.01°。
- 資料輸出頻率100Hz(串列傳輸速率115200)/20Hz(串列傳輸速率9600)。
- 資料介面:串口(TTL電平),I2C(直接連MPU6050,無姿態輸出)
- 串列傳輸速率115200kps/9600kps。
- 提供單片機解析示例代碼。
教學與文件
Main Features:
- WT61 Gyroscope is good solution for angle measuring,acceleration measurement and angular velocity measurement,It integrates a 3-axis gyro and a 3-axis accelerometer.
- Kalman filter combines the gyro and accelerometer to get high precision angle measurement,it can be used such as four-axis flight control and self-balancing robot, angle measurement and depth measuring and so on.
- The module can get accurate attitude in a dynamic environment. Attitude measurement precision is 0.05degrees, high stability.
- Using high-precision gyro accelerometer MPU6050, read the measurement data by serial port,No need to study complex I2C protocol of MPU6050. Keep I2C interface of MPU6050 to meet the needs of advanced users.With advanced digital filtering technology, reduce the measurement noise and improve measurement accuracy.
- Using stamps holes gold plating, can be embedded in the user’s PCB board Technical Indicator
Specifications:
- Input voltage: 3.3V-5V
- Consumption current: typical 10mA
- Volume: 15.24mm X 15.24mm X 2mm
- Measuring : Attitude angle: 3 axis Acceleration: 3 Axis Angular Velocity: 3 Axis
- Range: Acceleration: ± 16g, angular velocity: ± 2000 ° / s.
- The data output frequency 100Hz (baud rate 115200) / 20Hz (9600 baud rate).
- Data Interface: Serial (TTL level), I2C (directly connected MPU6050, no attitude output).
- Baud rate 115200kps / 9600kps.
- Provide single-chip analytical sample code.
Note:Angle of Z axis will have accumulated error, because there is no magnetic field correction.
評價 (0)
搶先評價 “MPU6050 六軸串口加速度計模組 / 陀螺儀模組 / 內建卡曼濾波算法”
你必須登入才能發表評論。
相關商品
-
-
-
氣壓 / 地磁 / 多功能 IMU, 運動 / 位置 / 加速度
SparkFun HMC6343 Breakout 高階軍用電子羅盤模組
原始價格:NT$5,300。NT$4,250目前價格:NT$4,250。 (未稅) -
運動 / 位置 / 加速度
GY-87 10DOF MPU6050 加速度陀螺儀 HMC5883L電子指南針 BMP180 氣壓計 10軸感測器
原始價格:NT$380。NT$320目前價格:NT$320。 (未稅)產品速覽





商品評價
目前沒有評價。